§ 参考资料 共 1 条
绪论
表示学习
机器学习的一般流程:

浅层学习(shallow learning):不涉及特征的学习,仅仅依靠人工经验或特征转换方法来抽取
特征处理:这里是人工完成的
特征可以分成(这里用图像举例):
https://zhuanlan.zhihu.com/p/579717028
- 底层特征:轮廓、边缘、颜色、纹理和形状特征。图像的低层的特征语义信息比较少,但是目标位置准确
- 高层语义特征:值得是我们所能看的东西,比如对一张人脸提取低层特征我们可以提取到连的轮廓、鼻子、眼睛之类的,那么高层的特征就显示为一张人脸。高层的特征语义信息比较丰富,但是目标位置比较粗略。
语义的表示分为
- 局部(符号)表示:离散表示、符号表示,如 One-Hot 向量
- 分布式(distributed)表示:压缩的低维稠密向量
从局部(符号)映射到分布式表示称为嵌入(embedding)
表示学习:通过深度模型学习高层语义信息(也就是什么 loss 来梯度下降之类的)

深度学习
一个好的表示学习策略必须具备一定的深度
深度学习=表示学习+浅层学习(也叫决策学习、预测学习)

所有的东西都需要计算机自动来完成
核心问题:贡献度分配问题,即哪个结果影响最大
例子:
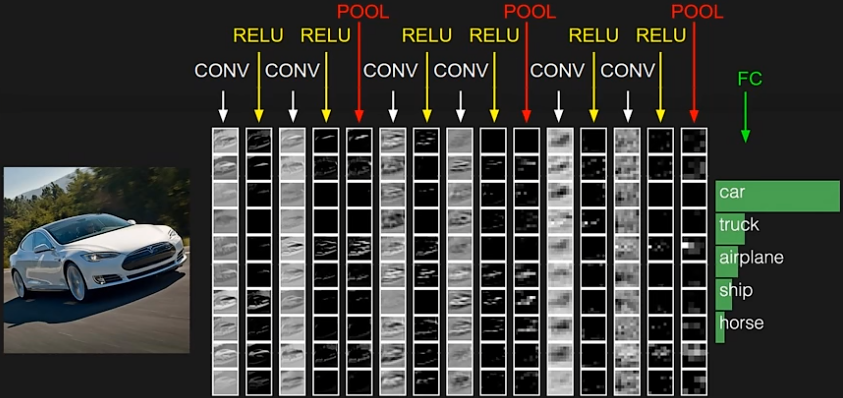
上面的图中,逐步提取了底层特征、中层特征、高层特征,最后在分类器里面进行分类
这是个端到端(End-to-End)模型:中间没有人工干预。深度学习模型不一定是端到端模型
神经网络
下面是简单的人工神经元:
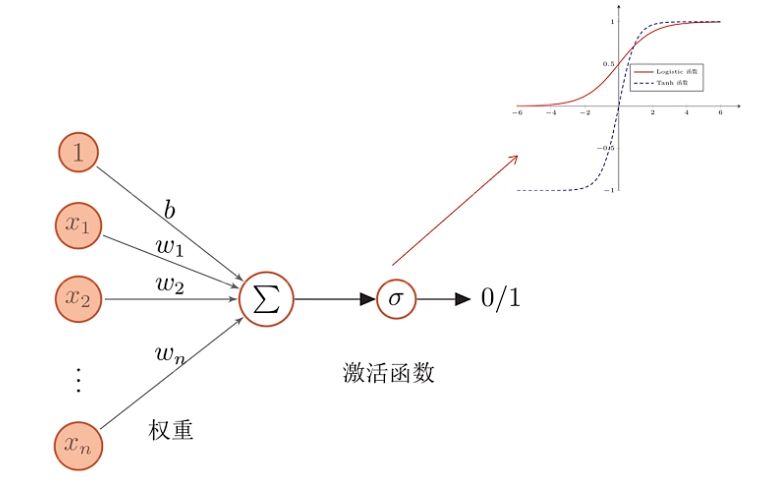
其中,信号 $1$、$x_1$ 到 $x_n$ 被神经元按照 $b$、$w_1$ 到 $w_n$ 的权重接受(加权和),然后经过一个激活函数,最后产生一个新的信号
神经网络由大量的神经元以及它们之间的有向连接构成,因此需要考虑三方面:
- 神经元的激活规则(激活函数):神经元输入到输出的映射关系
- 网络的拓扑结构:不同神经元之间的链接关系
- 学习算法:训练的参数
神经网络根据结构大体分成三种:
- 前馈网络:信息只向前传播
- 记忆网络:有反馈边,在不同时刻有不同的状态(也就是记忆)
- 图网络:网络结构是个图
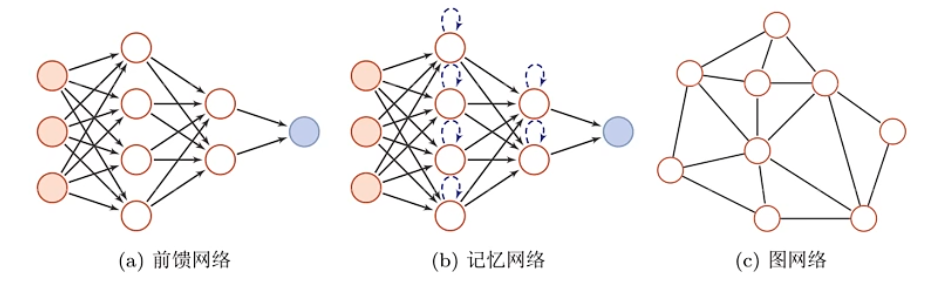
大多数网络是一个复合结构
神经网络的每一层可以表示成:
$$ f^l(\vec x)=\sigma(W^lf^{l-1}(\vec x)) $$神经网络可以解决贡献度分配问题:
$$ \frac{\partial y}{\partial W^l}=\frac{y(W^l+\Delta W)-y(W^l)}{\Delta W} $$(这里之后要再看)
我们可以发现,假如某个参数非常重要,那么如果对这个参数做一个扰动,会对结果产生很大的影响。这样就可以调整贡献度分配了
机器学习
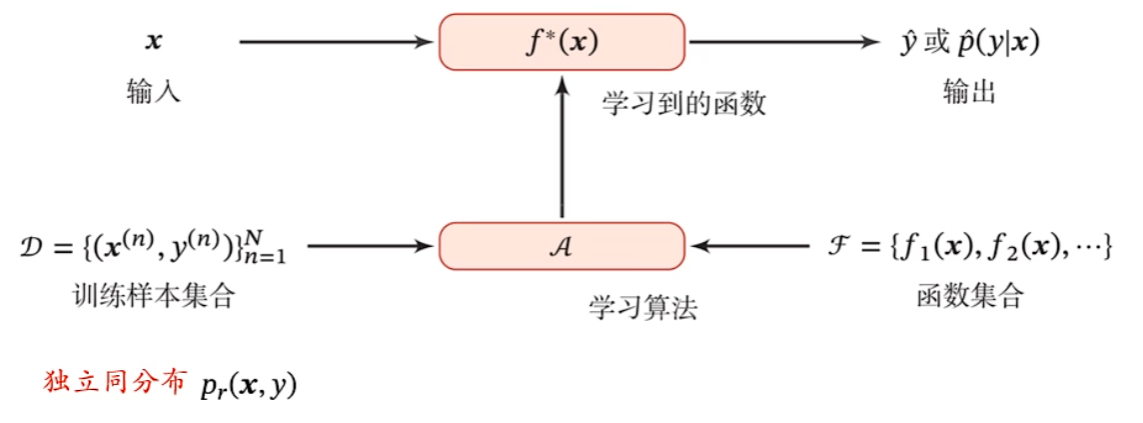
机器学习就是自动构建一个映射函数,即从大量数据中学习一般性规律,并且使用这些规律来对未知数据进行预测
机器学习的分类
根据学习的方法可以分成三类:
| 监督学习 | 无监督学习 | 强化学习 | |
|---|---|---|---|
| 训练样本 | 训练集 $\{(\vec x^{(n)},y^{(n)})\}_{n-1}^N$ | 训练集 $\{(\vec x^{(n)})\}_{n-1}^N$ | 智能体与环境交互的轨迹 $\tau$ 和累积奖励 $G_\tau$ |
| 优化目标 | $y=f(\vec x)$ 或 $p(y\vert\vec x)$ | $p(\vec x)$ 或带隐变量 $\vec z$ 的 $p(\vec x\vert\vec z)$ | 期望总回报 $\mathbb E_\tau[G_\tau]$ |
| 学习准则 | 期望风险最小化 最大似然估计 | 最大似然估计 最小重构错误 | 策略评估 策略改进 |
还可以结合起来:半监督学习
还有:半监督学习、弱监督学习等
两个典型的监督学习问题:
- 回归(regression)问题:给定输入变量(特征),输出一个连续值
- 分类(classification)问题:给定输入变量(特征),输出一个离散值
典型的无监督学习问题:
- 聚类问题
- 降维问题
- 密度估计
机器学习的四个要素
数据、模型、学习准则、优化算法
模型其实就是一个函数,如线性回归任务:
$$ f(\vec x;\theta)=\mathbf w^T\vec x+b $$其中,$\mathbf w^T$ 和 $b$ 是要学习的参数,$\theta$ 是所有要学习的参数总称
非线性回归任务:
$$ f(\vec x;\theta)=\mathbf w^T\phi(\vec x)+b $$其中,$\phi$ 是一个非线性基函数,如果它是可学习的,就可以把这个函数看做神经网络
学习准则是学习的目标,一个好的模型应该在所有取值上都与真实映射函数一致
这就涉及到损失函数(loss function):一个非负实函数,量化预测值与真实值的差异。例如平方损失函数(quadratic loss function):
$$ \mathcal L(y,f(\vec x,\theta))=\frac{1}{2}\left(y-f(\vec x,\theta)\right)^2 $$在定义完损失函数之后,还有期望风险(expected risk):
$$ \mathcal R(\theta)=\mathrm E_{(\vec x,y)\sim p_r(\vec x,y)}[\mathcal L\left(y,f(\vec x,\theta)\right)] $$其中,$p_r(\vec x,y)$ 是真实的数据分布,$\mathcal L$ 是损失函数
这个值是无法计算的,根据大数定律,可以近似为:
$$ \mathcal R_{\mathcal D}^{\text{emp}}(\theta)=\frac{1}{N}\sum_{n=1}^N\mathcal L\left(y^{(n)},f(\vec x^{(n)},\theta)\right) $$这个叫做经验风险(empirical risk)
然后我们就只要最小化经验风险即可,这样机器学习问题就转化成了最优化问题
优化算法指的就是最优化问题的方法,例如梯度下降法:
$$ \theta_{t+1}=\theta_t-\alpha\frac{\partial \mathcal R_\mathcal D(\theta)}{\partial \theta} $$其中步长 $\alpha$ 称为学习率,是个超参数,后面是梯度
改进:随机梯度下降、小批次梯度下降
泛化与正则化
欠拟合、过拟合问题:
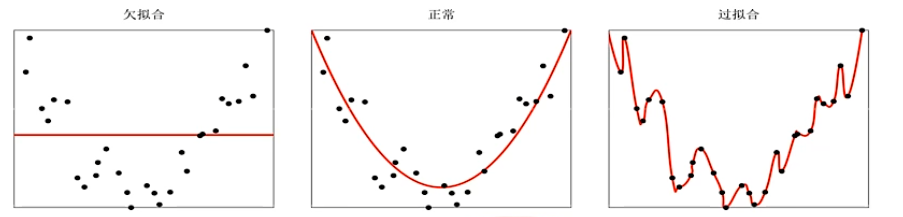
过拟合问题的原因:训练数据少、噪声等
所以机器学习不等价为优化问题,因为期望风险不等价于经验风险,差异称为泛化误差:
$$ \mathcal G_\mathcal D(f)=\mathcal R(f)-\mathcal R_\mathcal D^{\text{emp}}(f) $$通过正则化(regularizayion,降低模型复杂度)的方法可以减少泛化误差
所有损害优化的方法都是正则化,如:
- 增加优化约束:L1/L2 约束、数据增强
- 干扰优化过程:权重衰减、随机梯度下降、提前停止(使用验证集测试,如果错误率不降低就停止迭代)
线性回归和多项式回归
最小二乘法
避免不可逆问题,加入结构风险作为正则化项:
$$ \mathcal{\hat R}(\mathbf w)=\frac{1}{2}\Vert \vec y-\mathbf X^T\mathbf w\Vert^2+\frac{1}{2}\lambda\Vert\mathbf w\Vert^2 $$其中,$\lambda$ 叫做正则化系数。此时最小化得到:
$$ \mathbf w^*=(\mathbf X\mathbf X^T+\lambda \mathbf I)^{-1}\mathbf X\vec y $$此时叫做结构风险最优化
多项式曲线拟合(polynomial curve fitting),多项式的次数 $M$ 是一个超参数
加入正则化项来惩罚大系数
可以通过增大样本数量来避免过拟合
线性模型
线性分类模型:二分类与多分类
交叉熵:
在信息论中,熵(entropy)用来衡量随机事件的不确定性。熵越高随机变量的信息越多,熵越低随机变量的信息越少
自信息(self information):一个随机事件中包含的信息量
对于随机变量 $X$,当 $X=x$ 时自信息定义为:
$$ I(x)=-\log p(x) $$熵此时可以定义为随机变量 $X$ 的自信息的数学期望:
$$ H(x)=\mathrm E_X[I(x)]=\mathrm E_X[-\log p(x)]=-\sum_{x\in X}p(x)\log p(x) $$熵编码(entropy encoding):使用自信息进行编码,即对于 $x\in X$,如果分布函数为 $p$,那么熵编码为:
$$ -\log p(x) $$交叉熵(cross entropy):按照概率分布 $q$ 的最优编码对真实分布为 $p$ 的信息进行编码的长度
$$ H(p,q)=\mathrm E_p[-\log q(x)]=-\sum_{x}p(x)\log q(x) $$KL 散度(Kullback-Leibler divergence)是用概率分布 $q$ 来近似 $p$ 时所造成的信息损失量
$$ \mathrm{KL}(p,q)=H(p,q)-H(p)=\sum_{x}p(x)\log\frac{p(x)}{q(x)} $$交叉熵损失、负对数似然
前馈神经网络
神经元
人工神经元如下:
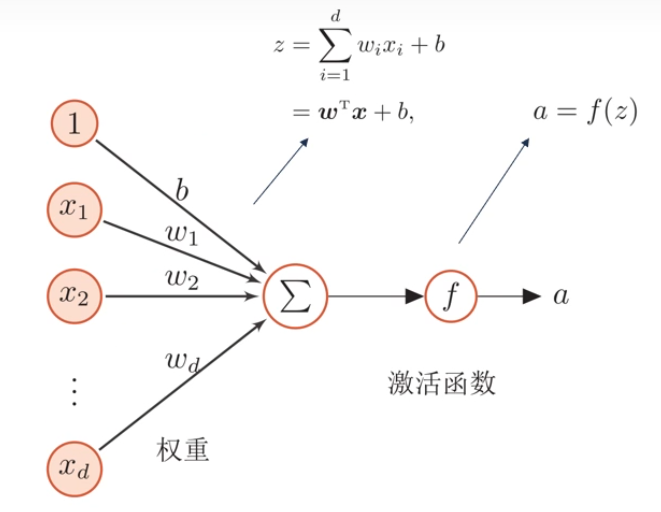
这是一个简单的线性模型
其中,激活函数有很多,它需要满足一些性质:
- 连续可导(允许少数点上不可导)的非线性函数,方便使用数值优化的方法来学习网络参数
- 激活函数及其导函数尽可能简单,以提高网络计算效率
- 激活函数的导函数的值域要在一个合适的区间内(不能太大也不能太小)
常用的激活函数:
- S 型函数(Sigmoid function)
- 斜坡函数(ramp function)
- 复合函数(compound function)
S 型函数举例:
Logistics 函数:
$$ \sigma(x)=\frac{1}{1+e^{-x}} $$$\tanh$ 函数:
$$ \tanh(x)=\frac{e^x-e^{-x}}{e^x+e^{-x}} $$它们有下面的关系:
$$ \tanh(x)=2\sigma(2x)-1 $$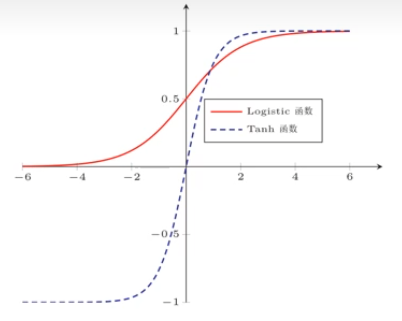
性质:
- 这两个函数都是饱和函数(两边梯度接近 $0$)
- $\tanh$ 函数是零中心化的,而 Logistics 函数的输出恒大于 $0$
非零中心化的输出会使后一层神经元的输入发生偏置偏移 bias shift,使得收敛速度变慢
斜坡函数举例:
ReLU 函数:
$$ \mathrm{ReLU}(x)=\max(0,x) $$它计算高效,生物学合理,一定程度上缓解梯度消失问题
但是有死亡 ReLU 问题(dying ReLU problem)
改进方法:LeakyReLU 函数:
$$ \mathrm{LeakyReLU }(x)=\max(0,x)+\gamma\min(0,x) $$近似的零中心化的非线性函数:
$$ \mathrm{ELU}(x)=\max(0,x)+\min(0,\gamma(e^x-1)) $$Rectifier 函数的平滑版本:
$$ \mathrm{Softplus}(x)=\log(1+e^x) $$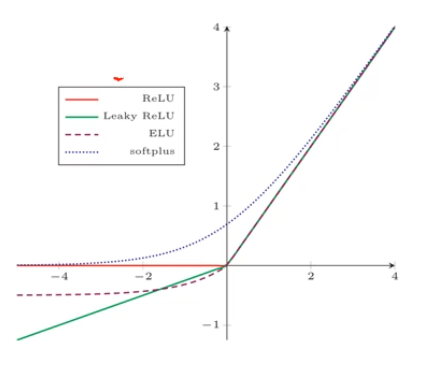
复合函数举例:
Swish 函数:一种自门控(Self-Gated)激活函数
$$ \mathrm{swish}(x)=x\sigma(\beta x) $$高斯误差线性单元(Gaussian Rrror Linear Unit,GELU):
$$ \mathrm{GELU}(x)=xP(X\le x) $$其中,$P(X\le x)$ 是高斯分布 $N(\mu,\sigma^2)$ 的累积分布函数,$\mu$ 和 $\sigma$ 是超参数
它可以用 $\tanh$ 函数或者 Logistic 函数来近似
前馈神经网络
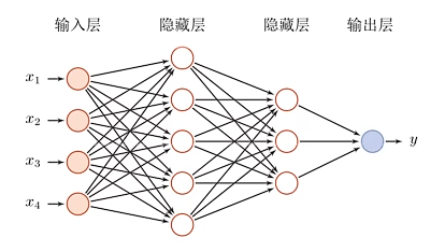
| 记号 | 含义 |
|---|---|
| $L$ | 层数 |
| $M_l$ | 第 $l$ 层神经元个数 |
| $f_l(\cdot)$ | 第 $l$ 层神经元的激活函数 |
| $\mathbf W^T\in\mathbb R^{M_l\times M_{l-1}}$ | 第 $l-1$ 层到第 $l$ 层的权重矩阵 |
| $\vec b^{(l)}\in\mathbb R^{M_l}$ | 第 $l-1$ 层到第 $l$ 层的偏置 |
| $\vec z^{(l)}\in\mathbb R^{M_l}$ | 第 $l$ 层神经元的净输入(纯活性值) |
| $\vec a^{(l)}\in\mathbb R^{M_l}$ | 第 $l$ 层神经元的输出(活性值) |
那么有:
$$ \begin{aligned} \vec z^{(l)}=\mathbf W^T\vec a^{(l-1)}+\vec b^{(l)}\\ \vec a^{(l)}=f_l(\vec z^{(l)}) \end{aligned} $$前馈计算就是:
$$ \vec x=\vec a^{(0)}\rightarrow\vec z^{(1)}\rightarrow\vec a^{(1)}\rightarrow\cdots\rightarrow\vec z^{(L)}\rightarrow\vec a^{(L)}\rightarrow\phi(\vec x;\theta) $$通用近似定理:神经网络可以近似任何的函数
Softmax 函数是一种特殊的激活函数
关于多分类问题:
- 最后一层的多个神经元经过 Softmax 归一化后可以作为条件概率
- 采用交叉熵损失函数,即:$\mathcal L(\vec y,\hat{\vec y})=-\vec y^T\log\hat{\vec y}$
结构化风险函数:
$$ \mathcal{\hat R}(\mathbf W)=\frac{1}{N}\sum_{n=1}^N\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})+\frac{1}{2}\lambda\Vert\mathbf W\Vert^2_F $$其中,$\Vert\mathbf W\Vert^2_F$ 叫做 Forbenius 范数:
$$ \Vert\mathbf W\Vert^2_F=\sum_{l=1}^{L}\sum_{i=1}^{M_l}\sum_{j=1}^{M_{l-1}}\left(w_{ij}^{(l)}\right)^2 $$梯度下降:计算对于每一层的 $\mathbf W$ 和每一层的 $\vec b$ 即可
神经网络为一个复杂的复合函数,需要使用链式法则来计算偏导数
下面会介绍反向传播算法
还有更通用的自动微分方法(Automatic Differentiation,AD)
反向传播
矩阵微积分(matrix calculus):标量关于向量的偏导数、向量关于向量的偏导数、链式法则(注意顺序)
需要对于结构化风险函数进行求导,因为正则化项求导较为简单,所以略过它,只求前面的:
$$ \begin{aligned} \frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial w_{ij}^{(l)}}&=\frac{\partial\vec z^{(l)}}{\partial w_{ij}^{(l)}}\frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial\vec z^{(l)}}\\ \frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial \vec b^{(l)}}&=\frac{\partial\vec z^{(l)}}{\partial\vec b^{(l)}}\frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial\vec z^{(l)}} \end{aligned} $$对于每个式子前面那一项,可以得到:
$$ \begin{aligned} \frac{\partial\vec z^{(l)}}{\partial w_{ij}^{(l)}}&=[0,\cdots,a_j^{(l-1)},\cdots,0]\in\mathbb R^{1\times M_l} \\ \frac{\partial\vec z^{(l)}}{\partial\vec b^{(l)}}&=\mathbf I_{M_l}\in\mathbb R^{M_l\times M_l} \end{aligned} $$后面的项是误差项,记作 $\delta^{(l)}\in \mathbb R^{M_l}$,可以算出:
$$ \delta^{(l)}=f_l'(\vec z^{(l)})\odot \left((\mathbf W^{(l+1)})^T\delta^{(l+1)}\right) $$其中,$\odot$ 表示逐元素乘。这个过程就叫做反向传播
我们可以合起来:
$$ \begin{aligned} \frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial \mathbf W^{(l)}}&=\delta^{(l)}(\vec a^{(l-1)})^T\in\mathbb R^{M_l\times M_l}\\ \frac{\partial\mathcal L(\vec y^{(n)},\hat{\vec y}^{(n)})}{\partial \vec b^{(l)}}&=\delta^{(l)}\in \mathbb R^{M_l} \end{aligned} $$计算图与自动微分
自动微分是利用链式法则来自动计算一个复合函数的梯度
计算图:
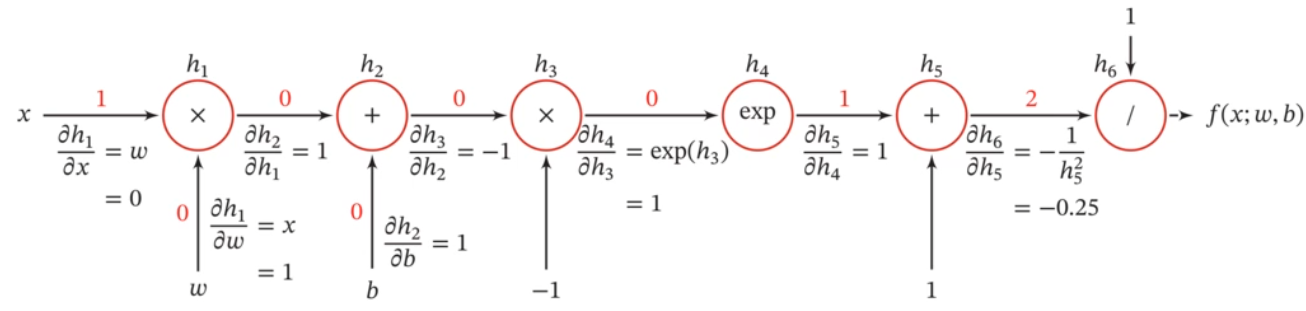
自动微分分为反向模式和前向模式
静态计算图(tensorflow)与动态计算图(pytorch)
优化问题
非凸优化问题:全局最优与局部最优问题、鞍点问题
梯度消失问题(vanishing gradient problem):链式法则计算后期梯度趋近为 $0$
卷积神经网络
局部不变性特征:尺度缩放、平移、旋转等操作不影响其语义信息
全连接前馈网络的参数非常多,很难提取这些局部不变特征
卷积神经网络(convolutional neural networks,CNN)是一种前馈神经网络,有三个结构上的特征:
- 局部连接
- 权重共享
- 空间或时间上的次采样
卷积
给定信号序列 $x$ 和滤波器 $w$,卷积的输出为:
$$ y_t=\sum_{k=1}^Kw_kx_{t-k+1} $$其中,$w$ 称为卷积核(convolutional kernel)或滤波器(filter)
如果卷积核长度为 $K$,输入长度为 $N$,那么输出长度就是 $N-K+1$
作用:近似微分、低通或高通滤波
引入滑动步长 $S$ 和零填充 $P$
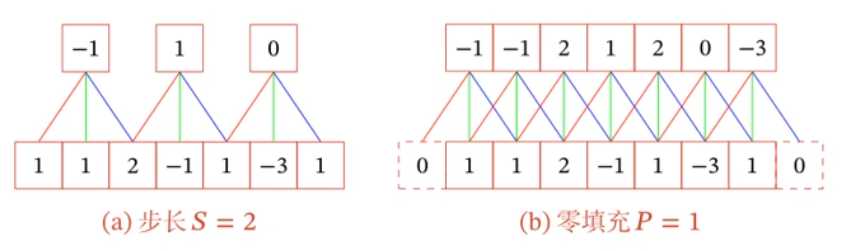
窄卷积、宽卷积、等宽卷积(目前文献中默认)
二维卷积:
$$ \mathbf Y=\mathbf W*\mathbf X $$即:
$$ y_{ij}=\sum_{u=1}^U\sum_{v=1}^Vw_{uv}x_{i-u+1,j-v+1} $$二维卷积可以作为特征提取器
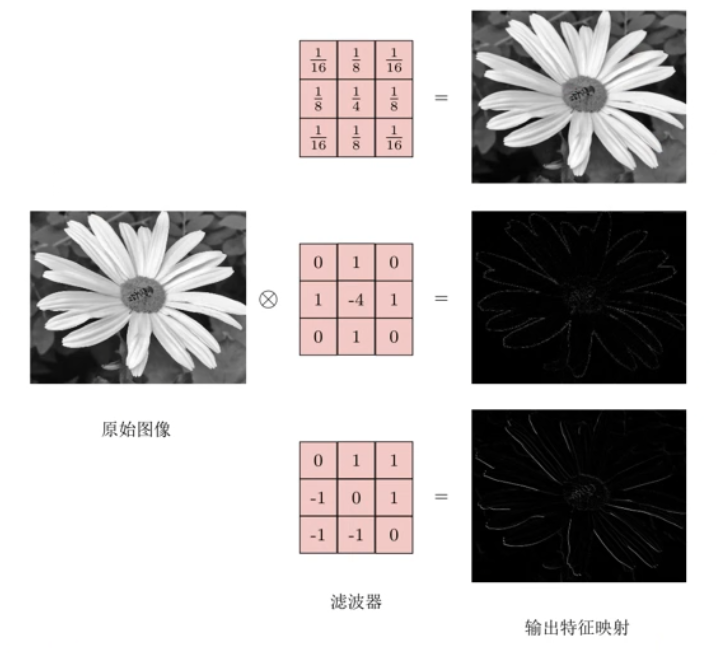
如果卷积核是一个可学习的参数,那么就叫做卷积神经网络
空洞卷积(增加感受野)、转置卷积或微步卷积(低维特征映射到高维特征)
卷积神经网络
用卷积层代替全连接层
互相关:计算卷积需要进行卷积核反转,这个反转是不必要的,取消这个反转就叫做互相关
一般来说,这里的卷积都是互相关
引入多个卷积核来增强卷积层的能力。
特征映射(feature map):图像经过卷积后得到的特征
卷积层的输入输出一般为:
- 输入:$D$ 个特征映射 $M\times N\times D$
- 输出:$P$ 个特征映射 $M'\times N'\times P$
其中,$D$ 和 $P$ 叫做深度或者通道数
卷积层的映射关系(对于第 $P$ 个特征映射)
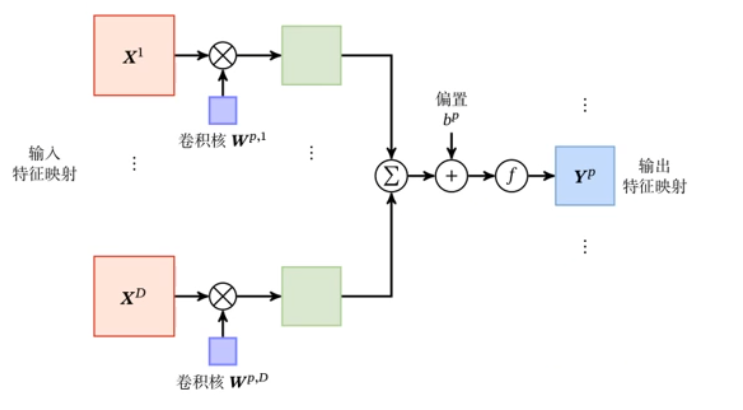
也就是:
$$ \begin{aligned} \mathbf Z^P&=\mathbf W^P\otimes\mathbf X+b^P=\sum_{d=1}^D\mathbf W^{P,d}\otimes\mathbf X+b^P\\ \mathbf Y^P&=f(\mathbf Z^P) \end{aligned} $$这是一个典型的卷积层,可以看成是三维结构:
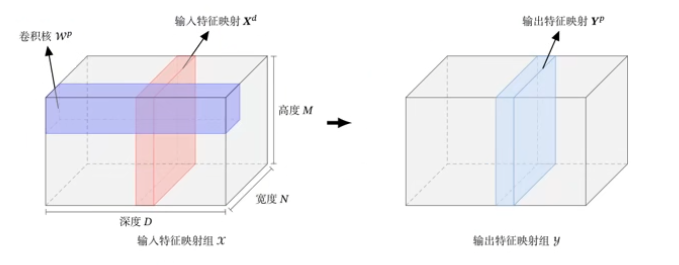
汇聚层(pooling layer)或者叫池化层:卷积层虽然可以显著减少连接的个数,但是每个特征映射的神经元个数并没有显著减少
汇聚层(pooling layer)要做的事就是降采样
最常用的叫最大汇聚(max pooling),还有平均汇聚
卷积神经网络有卷积层、汇聚层、全连接层交叉堆叠而成:
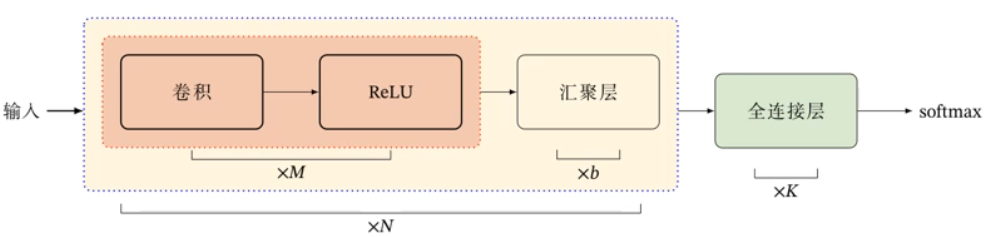
典型结构:
- 趋向于小卷积、大深度
- 趋向于全卷积
典型的 CNN:
- LeNet
- AlexNet:第一个现代深度卷积网络模型
- GoogLeNet:由多个 inception 模块和少量汇聚层堆叠而成
- ResNet(Residual Network):残差网络,152 层的深层网络。通过给非线性的卷积层增加直连边(shortcut connection)来提高信息的传播效率
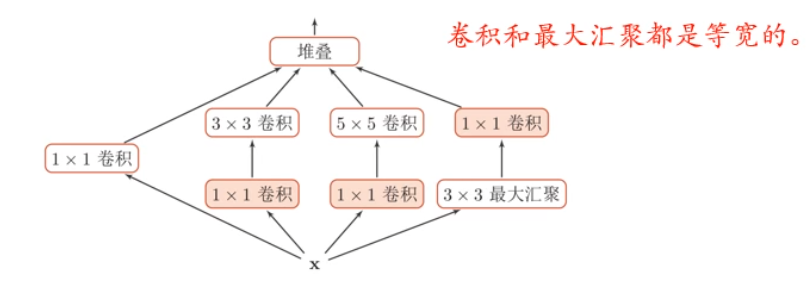
inception 模块 v1:
卷积网络中,如何设置卷积层的卷积核大小十分关键,在 inception 模块中,包含多个不同大小的卷积操作:
inception 模块 v3:
用多层小卷积核替换大卷积核,以减少计算量和参数量
- 用两层 $3\times 3$ 卷积来替换 v1 中 $5\times5$ 卷积
- 用连续的 $n\times 1$ 卷积和 $1\times n$ 卷积来 v1 中 $n\times n$ 卷积
残差网络的残差单元:
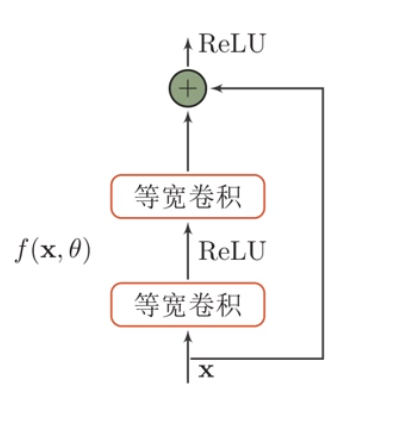
即:
$$ h(\vec x)=\vec x+f(\vec x,\theta) $$这样,由于偏导数有一个常数 $1$,所以偏导数不会很小,它可以堆得很深
还有:区域卷积神经网络(RCNN)
循环神经网络
优点:引入(短期)记忆、图灵完备
缺点:长程依赖问题、记忆容量问题、并行能力
给神经网络增加记忆能力
前面的神经网络没有记忆功能
时延神经网络(Time Delay Neural Network,TDNN):建立一个额外的延时单元:
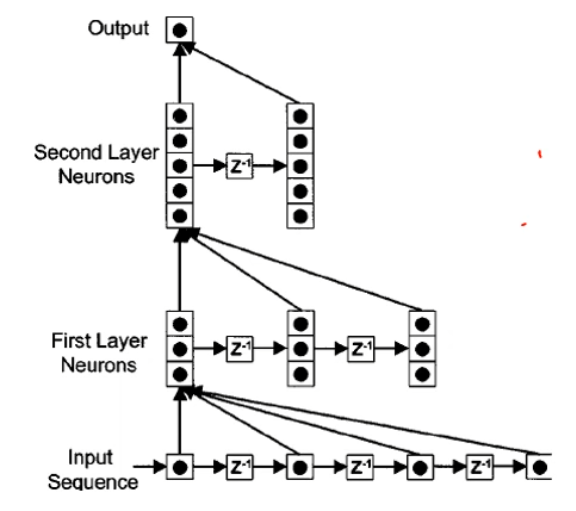
实际上就是:
$$ \vec {h}_t^{(l)}=f(\vec {h}_{t}^{(l)},\vec {h}_{t-1}^{(l)},\cdots,\vec {h}_{t-K}^{(l)}) $$自回归模型(Autoregressive Model,AR):
$$ \vec{y}_t=w_0+\sum_{k-1}^Kw_k\vec{y}_{t-k}+\epsilon_t $$其中,$\epsilon_t\sim N(0,\sigma^2)$ 是第 $t$ 时刻的噪声
有外部输入的非线性自回归模型(Nonlinear Autoregressive with Exogenous Inputs Model,NARX):
$$ \vec{y}_t=f(\vec{x}_t,\vec{x}_{t-1},\cdots,,\vec{x}_{t-K_x},\vec{y}_{t-1},\vec{y}_{t-2},\cdots,\vec{y}_{t-K_y}) $$其中,$K_x$ 与 $K_y$ 为超参数,$f(\cdot)$ 是一个非线性函数,可以是一个前馈网络
循环神经网络
循环神经网络(Recurrent Neural Network,RNN)通过使用带自反馈的神经元,能够处理任意长度的时序数据
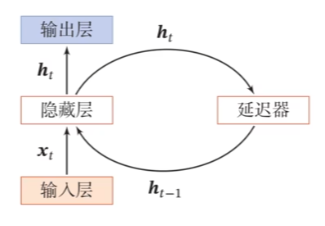
其中:
$$ \vec h_t=f(\vec h_{t-1},\vec x_t) $$$\vec h_t$ 叫做活性值状态
它比前馈神经网络更符合生物神经网络的结构
简单循环网络(Simple Recurrent Network,SRN):
$$ \vec h_t=f(\mathbf U\vec h_{t-1}+\mathbf W\vec x_t+\vec b) $$通用近似定理
应用到机器学习:
- 正常模式
- 按时间进行平均采样模式
- 同步的序列到序列模式
- 异步的序列到序列模式:左边叫做编码器,右边叫做解码器

参数学习和长程依赖问题
假设使用同步的序列到序列模式,它的瞬时损失函数为:
$$ \mathcal L_t=\mathcal L(y_t,g(\vec h_t)) $$其中,$y_t$ 表示真实值,后面的是预测值。
总的损失函数是:
$$ \mathcal L=\sum_{t=1}^T\mathcal L_t $$它也可以反向传播,这里就不细看了:
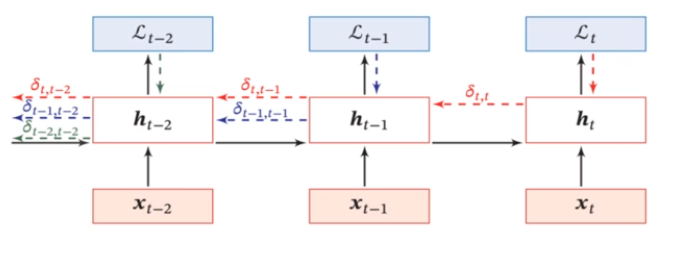
对于简单循环神经网络,它的误差项是:
$$ \delta_{t,k}=\prod_{\tau=k}^{t-1}\left(\mathrm{diag}(f'(\vec z_\tau)\mathbf U^T)\right)\delta_{t,t} $$为了方便研究,我们将其近似为:
$$ \delta_{t,k}\cong\gamma^{t-k}\delta_{t,t} $$当 $\gamma$ 大于 $1$ 时会发生梯度爆炸,当 $\gamma$ 小于 $1$ 时会发生梯度消失($t-k\to\infty$ 时),这个问题可以统称为长程依赖问题(long-term dependencies problem),实际上只能学习到短周期的依赖关系
如何改进?
- 梯度爆炸问题(相对容易解决):权重衰减、梯度截断
- 梯度消失问题:改进模型(循环边改成线性依赖关系、增加非线性(类似于残差网络))
GRU 和 LSTM
门控机制:控制信息的累积速度,包括有选择地加入新的信息,并有选择地遗忘之前累积的信息
基于门控的循环神经网络(Gated RNN):门控循环单元(Gated Recurrent Unit,GRU)、长短期记忆网络(long short-term memory,LSTM)
我们前面使用增加非线性的方式改进模型:
$$ \vec h_t=\vec h_{t-1}+g(\vec x_t,\vec h_{t-1};\theta) $$随着训练,$\vec h$ 可能会越来越大,从而使得后面的非线性函数出现饱和现象,套上激活函数之后趋近于 $1$
为了不让它变得这么大,引入某种遗忘机制:
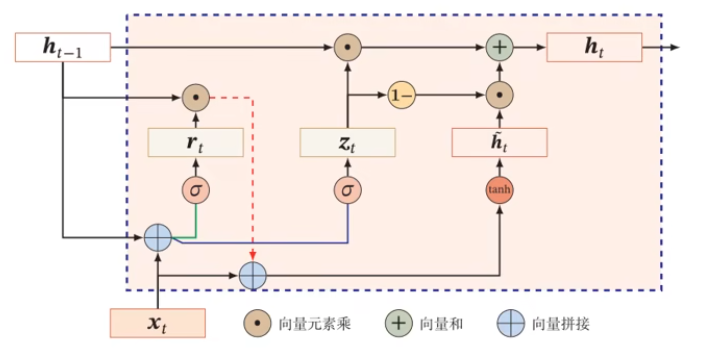
$$ \vec h_t=\vec z_t\odot\vec h_{t-1}+(1-\vec z_t)g(\vec x_t,\vec h_{t-1};\theta) $$其中,$\vec z_t\in (0,1)^d$,它叫做更新门,控制两个之间的比例
更新门的实现可以使用 Logistics 函数:
$$ \vec z_t=\sigma(\mathbf W_z\vec x_t+\mathbf U_z\vec h_{t-1}+\vec b_z) $$后面的 $g(\cdot)$ 可以使用 $\tanh$ 实现(这里记为 $\tilde {\vec h}_t$):
$$ \tilde {\vec h}_t=\tanh(\mathbf W_h\vec x_t+\mathbf U_h\vec h_{t-1}+\vec b_h) $$然后我们发现,当前的公式没法做到模型只与 $\vec x_t$ 相关,于是引入一个重置门 $\vec r_t$:
$$ \begin{aligned} \vec r_t&=\sigma(\mathbf W_r\vec x_t+\mathbf U_r\vec h_{t-1}+\vec b_r)\\ \tilde {\vec h}_t&=\tanh(\mathbf W_h\vec x_t+\mathbf U_h(\vec r_t\odot\vec h_{t-1})+\vec b_h) \end{aligned} $$这样就构成了一个门控循环单元:
LSTM 的结构如下:
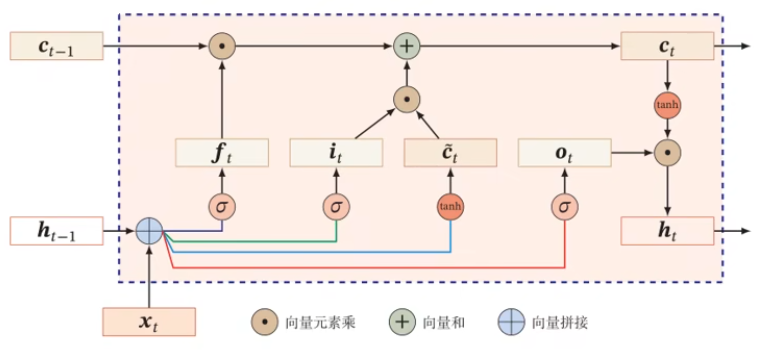
它引入了新的内部记忆单元 $\vec c$,来做线性,从而释放出 $\vec h$,让它可以更好地做非线性工作:
$$ \begin{aligned} \tilde {\vec c}_t&=\tanh(\mathbf W_c\vec x_t+\mathbf U_c\vec h_{t-1}+\vec b_c)\\ \vec c_t&=\vec f_t\odot\vec c_{t-1}+\vec i_t\odot\tilde {\vec c}_t \end{aligned} $$$\vec i_t$ 和 $\vec f_t$ 计算和前面差不多,然后得到 $\vec h_t$:
$$ \vec h_t=\vec o_t\odot\tanh(\vec c_t) $$耦合输入门和遗忘门、peephole 连接
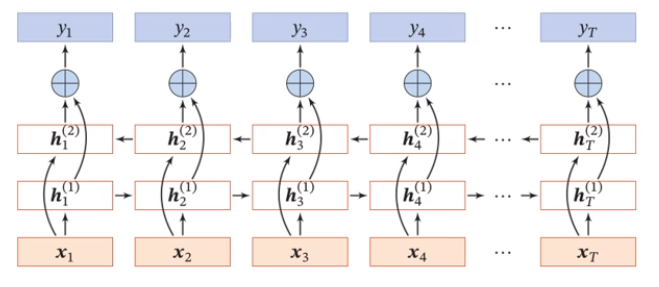
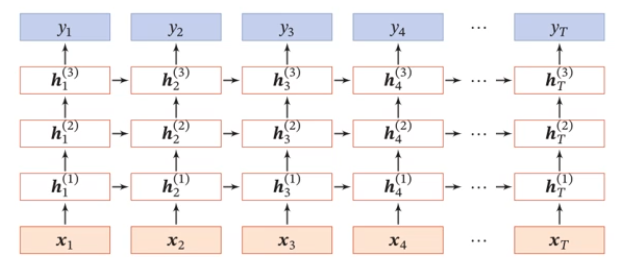
深层循环神经网络
堆叠(stacked)循环神经网络:
双向循环神经网络: