图形学的基本任务之一是渲染三维对象,以一组对象为输入,以像素数组为输出
可以分为两个大概的方法:对象顺序渲染(object-order rendering,对每个对象找到影响的像素并更新)和图像顺序渲染(image-order rendering,对每个像素找到对应的对象并更新)
对象顺序渲染和图像顺序渲染计算出的结果相同,但适合不同任务,拥有不同的性能特征。广义上讲图像顺序渲染容易产生更灵活的效果,但需要更多的执行时间
光线追踪(Ray tracing)是一个图像顺序渲染算法
基础的光线追踪算法
一次计算一个像素,对于每个像素,找到对应的位置能够看到的对象。
观察射线(viewing ray):一条从视点(viewpoint)发射出来的朝向像素观察方向的射线
任何被像素“看”到的物体都应该与观察射线相交,我们想要的特定对象时距离摄像机最近的与观察射线相交的对象,因为它会阻挡后面任何其他对象
找到对象后,着色计算器(shading computation)会使用交点、表面法线和其他信息来确定像素的颜色
基本的光线追踪器有三个部分:
- 射线生成(ray generation):计算每个像素观察射线的原点和方向
- 射线相交(ray intersection):找到最近的与观察射线相交的对象
- 着色(shading):根据射线相交的结果计算像素颜色
视角(Perspective)
艺术家尝试过很多使用二维绘画表现三维物体的方法,其中有很多非传统的方法,包括立体派绘画、鱼眼镜头、外围相机,但标准方法是线性透视
线性透视(linear perspective):三维对象被投影(project)到一个图像平面(image plane)上,在这个过程中场景中的直线成为图像中的直线
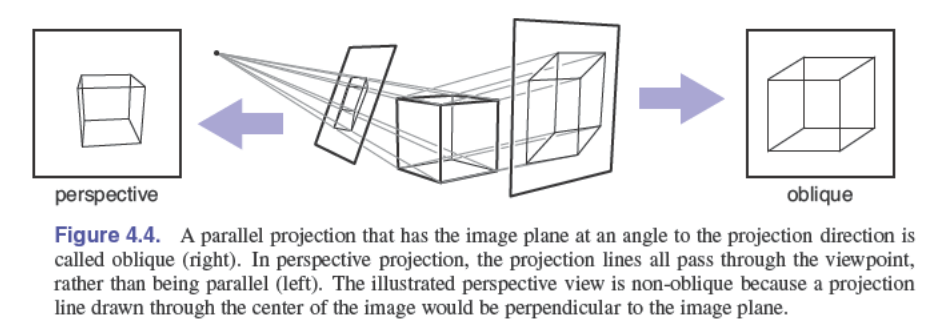
平行投影(parallel projection):沿着投影方向(projection direction)移动三维中的点,把它们放到图像上。投影的效果与投影方向和图像平面的选择有关。如果图像平面垂直于投影方向,那么称它是正交(orthographic)投影,否则称它是斜(oblique)投影。它常用于机械和建筑图形,因为它可以保留图像的大小和形状。同时这也是它的局限性,与日常生活经验不同,呈现处理的对象大小与远近无关。
透视投影(perspective projection):沿着经过视点的射线而不是平行线投影。这样保证距离视点较远的对象在投影时会变小。投影的效果与视点和图像平面决定。视点在图像中心后面的称为非倾斜投影,否则就是斜投影
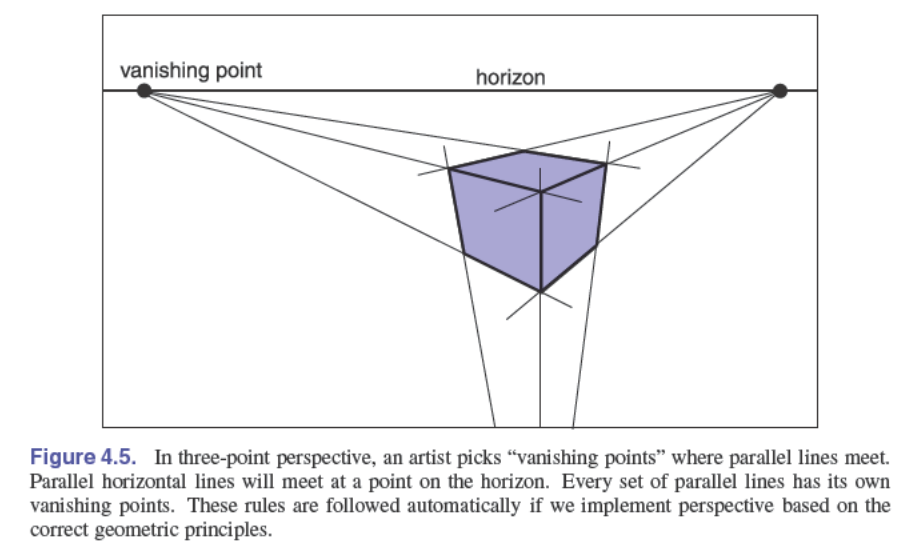
三点透视(three-point perspective):看不懂,对应的还有一点透视和两点透视
计算观察射线
射线的数学表示:
$$ \vec p(t)=\vec e+t(\vec s - \vec e) $$原点 $\vec e$ 沿着 $(\vec s-\vec e)$ 方向的射线,当 $t<0$ 时,点 $\vec p(t)$ 在原点“后面”
所有的射线生成方法都是在一个叫做相机坐标系(camera frame)的正交坐标系开始的,这个坐标系长这样:
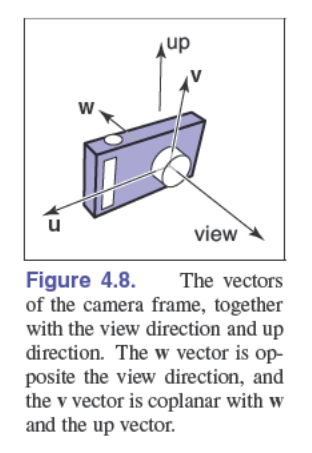
其中,原点(视点)我们称之为 $\vec e$,即 eye
不管是平行投影还是透视投影,都可以用相机坐标系来表示,如下:
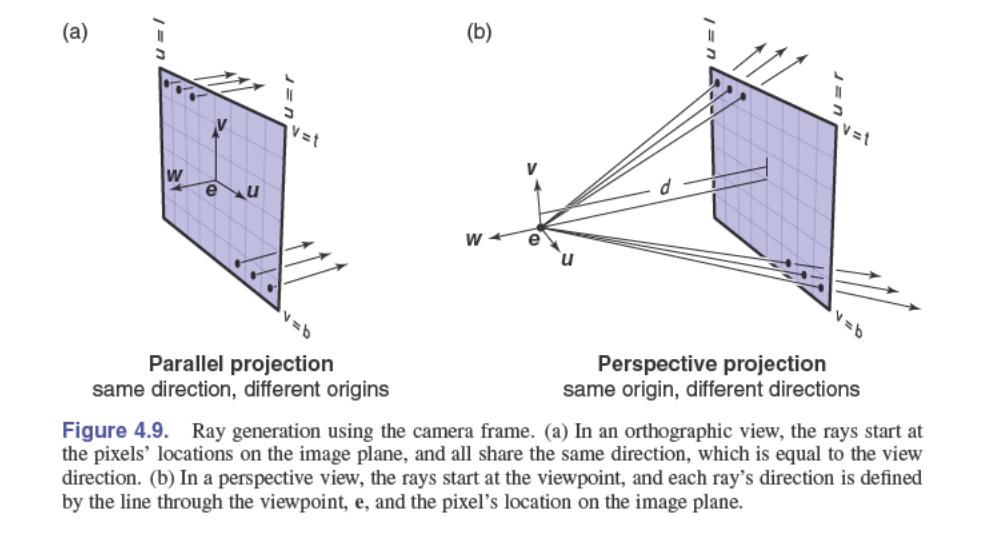
除了坐标系原点 $\vec e$ 之外,使用 $l$、$r$、$t$、$b$ 一起约束了图像的尺寸和位置。
为了将 $n_x\times n_y$ 个像素匹配到大小为 $(r-l)\times (t-b)$ 的矩形上,我们可以计算一下每个像素在矩形中的位置,对于 $(i,j)$ 这个像素来说,位置为:
$$ \begin{aligned} u=l+(r-l)\times\frac{i+0.5}{n_x} \\ v=b+(t-b)\times\frac{j+0.5}{n_y} \end{aligned} $$知道了每个像素对应的位置,我们可以得到两种投影方式的射线:
$$ \begin{aligned} \vec {p_{\text{平行}}}(t)=(\vec e+u\vec u+v\vec v)+t(-\vec w)\\ \vec {p_{\text{透视}}}(t)=\vec e+t(-d\vec w+u\vec u+v\vec v) \end{aligned} $$一个射线类:
class Ray
Vec3 o
Vec3 d
Vec3 evaluate(real t)
return o + td
射线与物体的交点
在生成了观察射线之后,我们需要找到这个射线与物体的第一个交点
射线与球面交点
球面通常使用隐式曲面表示,即给一个 $f(\vec p)=0$,此时我们只需要代入 $\vec p(t)=\vec e+t\vec d$:
$$ f(\vec p(t))=0 $$球面的隐式方程为:
$$ (\vec p-\vec c)\cdot(\vec p-\vec c)-r^2=0 $$代入后:
$$ \begin{aligned} (\vec e +t\vec d-\vec c)\cdot (\vec e +t\vec d-\vec c)-r^2=0 \\ (\vec d\cdot \vec d)t^2+2\vec d\cdot(\vec e -\vec c)t+(\vec e -\vec c)\cdot (\vec e -\vec c)-r^2=0 \end{aligned} $$这是个二次方程,直接解即可。另外,交点 $\vec p$ 处的法向量为 $\vec n=2(\vec p-\vec c)$,单位法向量为 $(\vec p-\vec c)/r$
射线与三角的交点
有许多算法,这里介绍重心坐标表示的参数平面,因为它除了三角形的顶点之外不需要长期存储(?)
参数平面为 $\vec f(u,v)$,或者写成 $\begin{bmatrix} x\\y\\z \end{bmatrix}=\begin{bmatrix} f_x(u,v)\\f_y(u,v)\\f_z(u,v) \end{bmatrix}$,我们直接代入 $\vec p(t)=\vec e+t\vec d$ 即可:
$$ \vec e+t\vec d=\vec f(u,v) $$对于三角形重心坐标系来说,它的参数方程为:
$$ \vec f(\beta,\gamma)=\vec a+\beta(\vec b-\vec a)+\gamma(\vec c -\vec a) $$代入:
$$ \vec e+t\vec d=\vec a+\beta(\vec b-\vec a)+\gamma(\vec c -\vec a) $$我们可与把它展开:
$$ \begin{aligned} x_e+tx_d=x_a+\beta(x_b-x_a)+\gamma(x_c-x_a)\\ y_e+ty_d=y_a+\beta(y_b-y_a)+\gamma(y_c-y_a)\\ z_e+tz_d=z_a+\beta(z_b-z_a)+\gamma(z_c-z_a) \end{aligned} $$写成矩阵形式:
$$ \begin{bmatrix}x_a-x_b & x_a-x_c & x_d \\y_a-y_b & y_a-y_c & y_d \\z_a-z_b & z_a-z_c & z_d\end{bmatrix} \begin{bmatrix}\beta\\\gamma\\t\end{bmatrix} =\begin{bmatrix}x_a-x_e\\y_a-y_e\\z_a-z_e\end{bmatrix} $$然后使用克莱默法则求解:
$$ \begin{aligned} \beta&=\frac{ \begin{vmatrix} x_a-x_e & x_a-x_c & x_d\\ y_a-y_e & y_a-y_c & y_d\\ z_a-z_e & z_a-z_c & z_d \end{vmatrix} }{|\mathbf A|}\\ \gamma&=\frac{ \left| \begin{matrix} x_a-x_b & x_a-x_e & x_d\\ y_a-y_b & y_a-y_e & y_d\\ z_a-z_b & z_a-z_e & z_d \end{matrix} \right| }{|\mathbf A|}\\ t&=\frac{ \left| \begin{matrix} x_a-x_b & x_a-x_c & x_a-x_e\\ y_a-y_b & y_a-y_c & y_a-y_e\\ z_a-z_b & z_a-z_c & z_a-z_e \end{matrix} \right| }{|\mathbf A|}\\ \end{aligned} $$其中:
$$ \mathbf A=\begin{bmatrix} x_a-x_b & x_a-x_c & x_d\\ y_a-y_b & y_a-y_c & y_d\\ z_a-z_b & z_a-z_c & z_d \end{bmatrix} $$三阶行列式可以展开来计算,可以使用“ei-minus-hf”的方式减少操作数量
boolean raytri(Ray r, vec3 a, vec3 b, vec3 c, interval [t0, t1])
compute t
if (t < t0) or (t > t1) then
return false
compute gamma
if (gamma < 0) or (gamma > 1) then
return false
compute beta
if (beta < 0) or (beta > 1 - gamma) then
return false
return true
软件中的射线求交
面向对象是个好主意
class HitRecord
Surface s
real t
Vec3 n
class Surface
HitRecord hit(Ray r, real t0, real t1)
Surface 是一个基类,派生 Triangle、Sphere 等子类
与一组对象相交
作为 Surface 的一个子类
class Group : Surface
list-of-Surface surfaces
HitRecord hit(Ray r, real t0, real t1)
HitRecord closet-hit(inf)
for surf in surfaces do
rec = surf.hit(ray, t0, t1)
if rec.t < inf then
closest-hit = rec
t1 = t
return closest-hit
注意 t1 = t 这句话可以不断缩小求交的范围,所以最后一定是更近的
着色(Shading)
我们已经知道了一个像素的可见表面,那么像素值可以通过着色模型(shading model)计算得出。
如何实现着色模型取决于应用程序,从简单的启发式到复杂的基于物理的模型都有,之后会讨论
事实上,一个着色模型既可以被用于光线追踪,也可以被用于对象顺序渲染
光源
着色模型支持基本的三种类型的点光源:
- 点光源(point light):从空间中的一点发出光线
- 定向光源(directional light):从单一方向照亮场景
- 环境照明(ambient light):提供恒定的照明以填充阴影
更高级的还支持:
- 区域光源(area light):发光的场景几何体
- 环境光源(environment light):使用图像来表示来自遥远来源的光
计算点光源、定向光源的着色需要四种向量:
- 着色点的位置 $\vec x$,使用 ray tracing 计算得到
- 表面法线 $\vec n$,使用 ray tracing 计算得到,或者也可以直接计算
- 光线方向 $\vec l$,根据光源计算得到
- 朝向方向(viewing direction) $\vec v$,指的是反射光朝向的方向,是射线的反方向,即 $\vec v=-\frac{\vec d}{\Vert\vec d\Vert}$
来自环境照明的着色更简单:没有 $\vec l$ 因为光来自四面八方,并且着色也不取决于朝向方向 $\vec v$。有时甚至不依赖于 $\vec x$ 和 $\vec n$
在包含多个光源的场景下,着色只是简单地将灯光的贡献加起来
软件中的着色
光源与材质,光源是 Light 类,存有足够的信息来描述光源,材质是 Material 类,封装了一切着色模型计算需要的东西
不同的系统使用不同的方法将光线和材质的职责分开,本章让光线负责整体的照明计算,而让材质负责计算 BRDF 值,如下:
class Light
Color illuminate(Ray ray, HitRecord hrec)
class Material
Color evaluate(Vec3 l, Vec3 v, Vec3 n)
每一个 Surface 都存储一个对自身 Material 的引用
一个点光源可以写成:
class PointLight : Light
Color I // 点光源颜色
Vec3 p // 点光源位置
Color illuminate(Ray ray, HitRecord hrec)
Vec3 x = ray.evaluate(hrec.t) // 得到位置
real r = || p - x || // 光源距离表面的距离
Vec3 l = (p - x) / r // 入射光线方向向量
Vec3 n = hrec.n // 表面法线
Color E = max(0, dot(n, l)) * I / r ^ 2 // 这里应该第 5 章会讲,计算出颜色
Color k = hrec.surface.material.evaluate(l, v, n) // 应该第 5 章会讲
return kE
一个环境照明可以写成(环境系数是材质的属性):
class AmbientLight : Light
Color Ia // 环境光照颜色
Color illuminate(Ray ray, HitRecord hrec)
Color ka = hrec.surface.material.ka
return ka * Ia // 环境光照颜色乘上环境光照系数
完整计算,包括求交及处理多个光源:
void shade-ray(Ray ray, real t0, real t1)
HitRecord rec = scene.hit(ray, t0, t1)
if rec.t < inf then // 有相交的对象
Color c = 0
for light in scene.lights do
c = c + light.illuminate(ray, rec)
return c
else
return background-color
这种设置将材质和光源分开,并且允许透明地(指实现对调用者透明)添加新的材质和光线。纹理添加了复杂性
没有体现与其他对象的关系(这里指的是下面的阴影)
阴影(Shadows)
阴影射线(shadow ray):决定是否在阴影中的射线,从某个位置 $\vec x$ 指向光源,与前面的观察射线不同(观察射线的方向由透视方式决定,而不取决于环境中的对象或光源)
阴影射线表示为 $\vec x+t\vec l$,$\vec l$ 表示方向
若光源处 $t_1=r$,那么如果 hit 到的物体 $t\in[0,r]$,那么说明在阴影中。不过因为精度问题一般不取 $0$,而是取 $\epsilon$ 这样一个极小值
实现大概像这样,在代码中添加一个 if 语句:
HitRecord srec = scene.hit(Ray(x, l), epsilon, r)
if srec.t < inf then
proceed with normal illumination calucation
else
return 0
定向光源类似,只不过 $t_1=\infty$
每个灯光的照明计算需要单独的阴影射线,并且在计算环境光阴影时没有阴影测试。阴影在显示附近对象之间的关系方面发挥着重要的视觉作用。
镜面反射(Mirror Reflection)
在光线追踪程序中添加理想镜面反射(ideal specular reflection)或镜面反射很简单。
设入射光线方向为 $\vec d$,法线为 $\vec n$,利用入射光线在法线上的投影可以算出射光线:
$$ \vec r = \vec d-2(\vec d\cdot\vec n)\vec n $$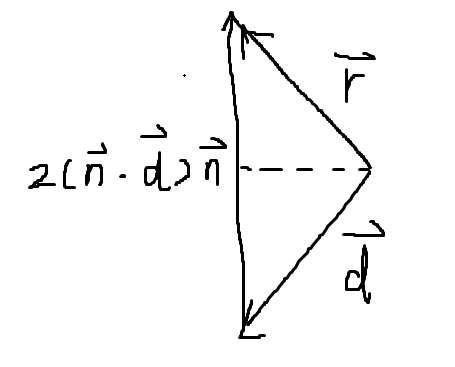
在真实世界中,反射有能量损失,这种损失对于不同颜色可能不同(例如,黄金反射黄色比蓝色反射得更多),因此它会改变所反射对象的颜色。
这可以通过在 shade-ray 中添加递归调用来实现,在计算完所有灯光的贡献后再添加一个贡献:
c = c + Km * shade-ray(Ray(p, r), 0, inf)
其中,Km 是镜面反射的 RGB 颜色,p 由是 hit 得到的位置,r 是反射光方向(对于光线来说实际上是入射光)
这句话的意思就是计算反射的光
上面递归调用的问题是它可能永远不会终止。这可以通过添加最大递归深度来修复。只有在 Km 不为零的情况下才能生成反射光线,代码将更有效。
在现实生活中,不同角度的 Km 有很大的变化
问题和练习
光线追踪通常用于拾取,即按下 F 键后让系统知道需要拾取那个物体
- 射线 $(1, 1, 1)+t(−1, −1, −1)$ 与以原点为中心、半径为 1 的球体的交点的射线参数是什么?注意:这是一个很好的调试案例
- 当射线 $(1, 1, 1) + t(−1, −1, −1)$ 射向顶点为 $(1, 0, 0)$、$(0, 1, 0)$ 和 $(0, 0, 1)$ 的三角形时,重心坐标和射线参数是多少?注意:这是一个很好的调试案例。
- 略
都不想做,它说是个很好的调试案例,没准之后会用得上