之前的章节中,矩阵变换是在三维或二维世界中排列对象的工具,矩阵变换的另一个重要用途是在“三维世界的二维视角”中的位置和三维世界中的位置进行转换
3D 到 2D 的映射叫做视图变换(viewing transformation),视口变换在对象顺序渲染中很重要,因为我们要频繁地查找每个对象在 2D 中的位置
第四章中,学习了不同类型的透视、正交视图以及如何生成观察射线。
本章是第四章的逆过程,本章将阐述如何使用矩阵变换来描述“平行视图”和“透视视图”,本章中的变换会将 3D 场景中的点投影到图像中的 2D 点,并且会将给定像素的观察射线上的任意点投影回像素的位置
把三维世界中的点投影到二维,仅仅能够做到线框(wireframe)的渲染,即物体边缘。距离摄像机更近的面不会遮挡更远的面
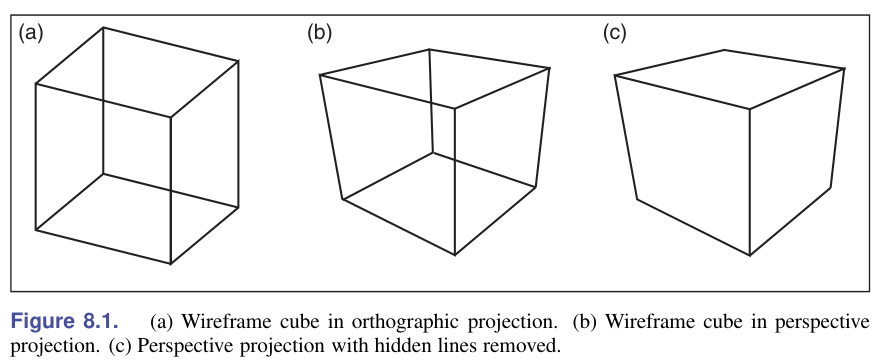
也就是这一章仅仅是线框的渲染,之后的章节会讨论对象表面的渲染
视图变换(Viewing Transformations)
视图变换的任务是将 3D 坐标 $(x, y, z)$ 映射到图像中的坐标(以像素为单位)
这是个复杂的过程,取决于摄像机的位置和方向、投影类型、视野、图像的分辨率等
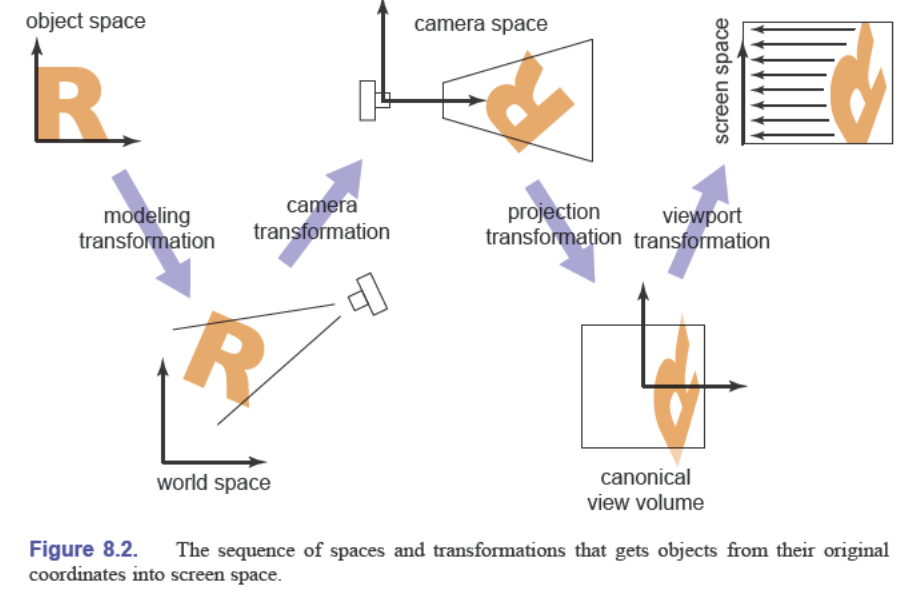
与所有复杂的变换一样,最好将其分解为几个更简单的变换的乘积。大多数图形系统通过使用三个变换序列来实现这一点:
- 相机变换(camera transformation)或视变换(eye transformation):将相机放置在原点,并且朝向方便计算的方向(例如 $x$ 轴正方向?)。这一步仅取决于相机的位置、方向或者叫姿态(pose)
- 投影变换(projection transformation):将三维场景中的点映射到相机空间(camera space),所有点将在 $x$ 和 $y$ 方向上都落到 $-1$ 到 $1$ 的范围内。这一步仅取决于投影类型
- 视口变换(viewport transformation)或窗口变换(windowing transformation):将单位图像矩形映射到像素坐标系的矩形。这一步仅取决于输出图像的大小和位置
摄像机坐标系(camera coordinates)、摄像机空间(camera space)
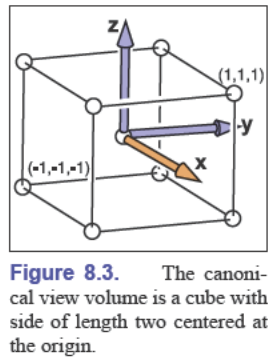
规范视空间(canonical view volume):$(x,y,z)\in [-1,1]^3$ 的一个正方体,$x=-1$ 和 $x=1$ 代表屏幕的最左侧和最右侧,$y=-1$ 和 $y=1$ 分别代表屏幕的最下边和最上边
视口变换(Viewport Transformation)
从规范视空间映射到屏幕空间(screen space),即将 $[-1,1]^2$ 映射到 $[-0.5,n_x-0.5]\times[-0.5,n_y-0.5]$
假设现在所有线段都在规范视空间内部,之后在讨论剪切(clipping)时,会放松这个限制
上一章有一个例子,提供了一个公式,如下:
$$ \begin{aligned} x'=n_x\frac{x+1}{2}-0.5\\ y'=n_y\frac{y+1}{2}-0.5 \end{aligned} $$写成矩阵形式:
$$ \begin{bmatrix}x_{\text{screen}}\\y_{\text{screen}}\\1\end{bmatrix}= \begin{bmatrix}\frac{n_x}{2} & 0 & \frac{n_x-1}{2}\\0 & \frac{n_y}{2} & \frac{n_y-1}{2}\\0 & 0 & 1\end{bmatrix} \begin{bmatrix}x_{\text{canonical}}\\y_{\text{canonical}}\\1\end{bmatrix} $$我们把 $z$ 坐标加进来(之后的章节会进行深度测试),得到视口(变换)矩阵(viewport matrix):
$$ \mathbf M_{\text{vp}}=\begin{bmatrix}\frac{n_x}{2} & 0& 0 & \frac{n_x-1}{2}\\0 & \frac{n_y}{2}& 0 & \frac{n_y-1}{2}\\0 & 0& 1 & 0\\0 & 0& 0 & 1\end{bmatrix} $$注意,这里好像有点问题:屏幕像素大小是 $n_x\times n_y$,那么整数表示的屏幕空间应该是 $[0,n_x-1]\times[0,n_y-1]$,所以屏幕空间应该是 $[-0.5,n_x-1.5]\times[-0.5,n_y-1.5]$
所以视口变换应该是:
$$ \mathbf M_{\text{vp}}=\begin{bmatrix}\frac{n_x}{2} & 0& 0 & \frac{n_x-3}{2}\\0 & \frac{n_y}{2}& 0 & \frac{n_y-3}{2}\\0 & 0& 1 & 0\\0 & 0& 0 & 1\end{bmatrix} $$正交投影矩阵
这里的正交投影应该指的是平行正交投影,最简单的一种,只需要垂直移动到图像上就可以了
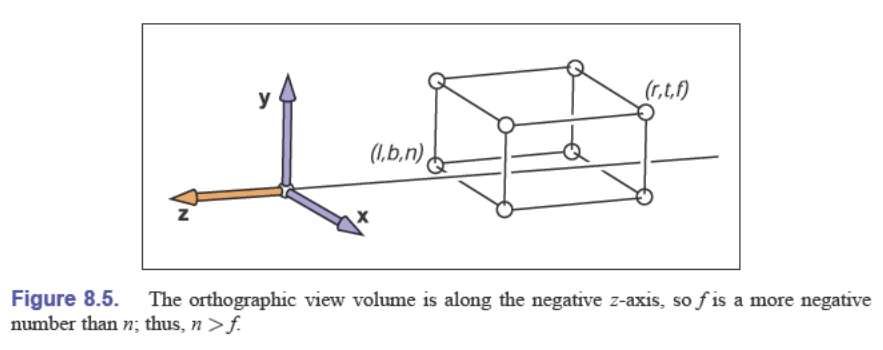
首先,将视线方向的方向记作 $-z$ 方向(与左手系、右手系有关),并且 $y$ 轴朝上
然后,框一个长方体 $[l,r]\times[b,t]\times[f,n]$
构成的空间被称为正交视图空间(orthographic view volume)
从正交视图空间到规范视空间的变换很简单:
$$ x'=\frac{x-\frac{l+r}{2}}{\frac{r-l}{2}}=\frac{2x-(r+l)}{r-l} $$写成矩阵就是:
$$ \mathbf M_{\text{orth}}=\begin{bmatrix}\frac{2}{r-l} & 0& 0 & -\frac{r+l}{r-l}\\0 & \frac{2}{t-b}& 0 & -\frac{t+b}{t-b}\\0 & 0& \frac{2}{n-f} & -\frac{n+f}{n-f}\\0 & 0& 0 & 1\end{bmatrix} $$从正交视图空间到屏幕空间变换就是把上面得到的两个矩阵相乘,即:
$$ \begin{bmatrix}x_{\text{screen}}\\y_{\text{screen}}\\z_{\text{canonical}}\\1\end{bmatrix}= \mathbf M_{\text{vp}}\mathbf M_{\text{orth}} \begin{bmatrix}x\\y\\z\\1\end{bmatrix} $$$z$ 轴现在在 $[-1,1]$ 区间内,之后使用 z-buffer 进行深度测试时需要
画线段的伪代码:
construct M_vp
construct M_orth
M = M_vp M_orth
for each line-segment (a_i, b_i) do
p = M a_i
q = M b_i
drawline(x_p, y_p, x_q, y_q)
相机变换(Camera Transformation)
相机变换就是世界空间到相机空间的变换
有许多约定用于指定相机的位置和方向。我们将使用以下一种:
- 眼睛的位置 $\vec e$
- 注视方向(gazing direction)$\vec g$
- 相机的向上向量 $\vec t$
通过这三个向量来构建一个坐标系
首先构建一个正交基:
$$ \begin{gather*} \vec{w}=-\frac{\vec{g}}{\Vert \vec{g}\Vert }\\ \vec{u}=\frac{\vec{t}\times\vec{w}}{\Vert \vec{t}\times\vec{w}\Vert }\\ \vec{v}=\vec{w}\times\vec{u} \end{gather*} $$然后加上位移 $\vec e$,根据上一章的坐标系变换,我们可以得到变换矩阵:
$$ \mathbf M_{\text{cam}}= \begin{bmatrix}\vec u& \vec v& \vec w & \vec e\\0 & 0& 0 & 1\end{bmatrix}^{-1}= \begin{bmatrix}x_u & x_v& x_w & x_e\\y_u & y_v& y_w & y_e\\z_u & z_v& z_w & z_e\\0 & 0& 0 & 1\end{bmatrix}^{-1} $$上一章中说,仿射变换可以分解成线性变换和平移变换,它可以写成:
$$ \mathbf M_{\text{cam}}=\left(\begin{bmatrix}1 & 0& 0 & x_e\\0 & 1& 0 & y_e\\0& 0& 1 & z_e\\0 & 0& 0 & 1\end{bmatrix}\begin{bmatrix}x_u & x_v& x_w & 0\\y_u & y_v& y_w & 0\\z_u & z_v& z_w & 0\\0 & 0& 0 & 1\end{bmatrix}\right)^{-1} $$其中,我们知道左上的坐标系变换是正交矩阵(因为它就是由三个正交向量组成),所以后面矩阵的逆可以很轻松地求出来
前面的矩阵是平移变换,所以根据数学意义也可以轻松求出
所以:
$$ \mathbf M_{\text{cam}}=\begin{bmatrix}x_u & y_u& z_u & 0\\x_v & y_v& z_v & 0\\x_w & y_w& z_w & 0\\0 & 0& 0 & 1\end{bmatrix}\begin{bmatrix}1 & 0& 0 & -x_e\\0 & 1& 0 & -y_e\\0& 0& 1 & -z_e\\0 & 0& 0 & 1\end{bmatrix} $$画线段的伪代码:
construct M_vp
construct M_orth
construct M_cam
M = M_vp M_orth M_cam
for each line-segment (a_i, b_i) do
p = M a_i
q = M b_i
drawline(x_p, y_p, x_q, y_q)
投影变换(Projective Transformations)
对于透视投影,我们要把空间中的点映射到规范视空间中,我们会用到 $z$ 坐标,并且 $z$ 坐标在分母上,如下(仅仅是举例子,并不是真的是这样):
$$ y_s=\frac{d}{z}y $$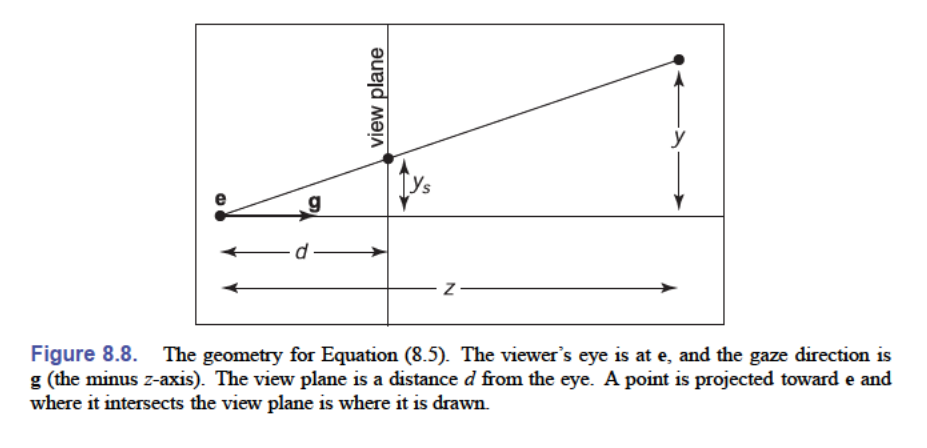
传统的矩阵变换做不到这样(除法)
我们使用一个简单的方法推广齐次坐标的机制来进行除法:
对于之前的齐次坐标,$(x,y,z)$ 表示为 $\begin{bmatrix}x& y& z & 1\end{bmatrix}^\mathrm T$,多出来的一维永远是 $1$,且仿射变换矩阵中的第四行永远是 $\begin{bmatrix}0& 0& 0 & 1\end{bmatrix}$
现在,我们让第四维是 $w$,$\begin{bmatrix}x& y& z & w\end{bmatrix}^\mathrm T$ 用来表示坐标 $(x/w,y/w,z/w)$,这对之前没有影响(因为除以 $1$ 没什么意义)
线性变换允许我们计算:
$$ \begin{aligned} x'=a_1x+b_1y+c_1z\\ y'=a_2x+b_2y+c_2z\\ z'=a_3x+b_3y+c_3z \end{aligned} $$仿射变换允许我们计算:
$$ \begin{aligned} x'=a_1x+b_1y+c_1z+d_1\\ y'=a_2x+b_2y+c_2z+d_2\\ z'=a_3x+b_3y+c_3z+d_3 \end{aligned} $$将 $w$ 作为分母允许我们计算:
$$ \begin{aligned} x'=\frac{a_1x+b_1y+c_1z+d_1}{ex+fy+gz+h}\\ y'=\frac{a_2x+b_2y+c_2z+d_2}{ex+fy+gz+h}\\ z'=\frac{a_3x+b_3y+c_3z+d_3}{ex+fy+gz+h} \end{aligned} $$但是,还有一个限制,就是 $x$、$y$、$z$ 的除数相同
表示成矩阵形式如下:
$$ \begin{bmatrix}\widetilde x\\\widetilde y\\\widetilde z\\\widetilde w\end{bmatrix}= \begin{bmatrix}a_1& b_1& c_1 & d_1\\a_2& b_2& c_2 & d_2\\a_3& b_3& c_3 & d_3\\e& f& g & h\end{bmatrix}\begin{bmatrix}x\\y\\z\\1\end{bmatrix} $$并且:
$$ (x',y',z')=(\widetilde x/\widetilde w,\widetilde y/\widetilde w,\widetilde z/\widetilde w) $$这样的变换称为投影变换(projective transformation)或者单应变换(homography)
有一种更优雅的方式来解释 $w$ 坐标:3D 投影变换视作 4D 线性变换,并且额外规定:
$$ \vec x\sim\alpha\vec x,\alpha\neq 0 $$这表示两个齐次坐标 $\vec x$ 与 $\alpha\vec x$($\alpha\neq 0$)是同一个三维空间中的点
这些点构成了一条直线

在需要笛卡尔坐标时,只需要找到它和 $w=1$ 这个面上的交点就可以了
其实就是说给齐次向量乘上一个倍数不影响它表示的坐标
透视投影
使用投影变换后,前面的 $y_s$ 表达式可以写成:
$$ \begin{bmatrix}y_s\\1\end{bmatrix}\sim\begin{bmatrix}d&0&0\\0&1&0\end{bmatrix}\begin{bmatrix}y\\z\\1\end{bmatrix} $$根据惯例,在相机空间中,相机朝向 $-z$ 方向,近屏幕和远平面为 $n$ 与 $f$(都是负数),使用这样的变换:
$$ \begin{gather*} x'=\frac{nx}{z}\\ y'=\frac{ny}{z}\\ z'=\frac{(n+f)z-fn}{z}=n+f-\frac{fn}{z} \end{gather*} $$为什么 $z$ 坐标不能直接使用呢?因为实现不了 $z'=z^2/z$ 的操作,只能通过相似的变换来实现。
规范视空间是 $[-1,1]^3$,为什么 $z$ 坐标没有映射到 $[-1,1]$ 上?因为这不是到规范视空间的变换,还要再乘上一个前面得到的 $\mathbf M_{\text{orth}}$
上面是最常用的一种变换,它保证了当 $z=n$ 和 $z=f$ 时有 $z'=z=n$ 和 $z'=z=f$
写成矩阵形式为:
$$ \mathbf P=\begin{bmatrix}n&0&0&0\\0&n&0&0\\0&0&n+f&-fn\\0&0&1&0\end{bmatrix} $$这个矩阵被称为透视矩阵(perspective matrix)
变换为:
$$ \mathbf P\begin{bmatrix}x\\y\\z\\1\end{bmatrix}=\begin{bmatrix}nx\\ny\\(n+f)z-fn\\z\end{bmatrix}\sim\begin{bmatrix}nx/z\\ny/z\\n+f-fn/z\\1\end{bmatrix} $$我们看一下 $\mathbf P$ 的逆:
$$ \mathbf P^{-1}=\begin{bmatrix}\frac{1}{n}&0&0&0\\0&\frac{1}{n}&0&0\\0&0&0&1\\0&0&-\frac{1}{fn}&\frac{n+f}{fn}\end{bmatrix} $$由于乘上一个系数没有影响,我们乘上一个 $fn$,它的逆可以写成:
$$ \mathbf P^{-1}=\begin{bmatrix}f&0&0&0\\0&f&0&0\\0&0&0&fn\\0&0&-1&n+f\end{bmatrix} $$我们乘上 $\mathbf M_{\text{orth}}$ 之后就是透视投影矩阵(perspective projection matrix),注意是左乘:
$$ \mathbf M_{\text{per}}=\mathbf M_{\text{orth}}\mathbf P $$一个问题是如何确定 $\mathbf M_{\text{orth}}$ 所需的 $l$、$r$、$b$、$t$,我们知道透视矩阵变换后,在 $z=n$ 面上 $x$ 与 $y$ 坐标不会改变,所以可以在这里确定 $l$、$r$、$b$、$t$
相乘之后 $\mathbf M_{\text{per}}$ 长这样:
$$ \mathbf M_{\text{per}}=\begin{bmatrix}\frac{2n}{r-l}&0&\frac{l+r}{l-r}&0 \\ 0&\frac{2n}{t-b}&\frac{b+t}{b-t}&0\\0&0&-\frac{f+n}{f-n}&\frac{2fn}{f-n}\\0&0&1&0\end{bmatrix} $$在 OpenGL 中,它会让我们指定 $|n|$ 和 $|f|$
其他的图像 API 中,通常将 $n$ 设置为 $0$,将 $f$ 设置为 $1$
规范视空间有时还会设置为 $[0,1]^3$
上面的决策都会改变投影矩阵
变换线段的伪代码:
construct M_vp
construct M_per
construct M_cam
M = M_vp M_per M_cam
for each line-segment (a_i, b_i) do
p = M a_i
q = M b_i
drawline(x_p, y_p, x_q, y_q)
透视变换的一些性质
直线性
一个重要性质是将线转换为线,将平面转换为平面,另外将线段转换为线段,例如,我们有这样的线段:
$$ \vec f(t)=\vec q+t(\vec Q-\vec q) $$对它进行透视变换:
$$ \begin{aligned} \vec g(t)&=\mathbf M_\text{per}(\vec q+t(\vec Q-\vec q))\\ &=\mathbf M_\text{per}\vec q+t(\mathbf M_\text{per}\vec Q-\mathbf M_\text{per}\vec q)\\ &\equiv\vec r+t(\vec R-\vec r) \end{aligned} $$如果没有同质化,那么肯定存在线性关系,且 $t$ 不变,所以有:
$$ w_g=w_r+t(w_r-w_r) $$经过同质化后,$\vec g(t)$、$\vec r$、$\vec R$ 变成了:
$$ \begin{gather*} \vec g(t)\rightarrow \frac{\vec r+t(\vec R-\vec r)}{w_r+t(w_r-w_r)}\\ \vec r\rightarrow \frac{\vec r}{w_r}\\ \vec R\rightarrow \frac{\vec R}{w_R} \end{gather*} $$其中,我们如果可以找到一个线性关系:
$$ \frac{\vec r+t(\vec R-\vec r)}{w_r+t(w_r-w_r)}=\frac{\vec r}{w_r}+t'\left(\frac{\vec R}{w_R}-\frac{\vec r}{w_r}\right) $$我们就可以知道:原来是一条直线上的点,经过透视变换并同质化后仍然在一条直线上
进行一些操作:
$$ \begin{aligned} \frac{\vec r+t(\vec R-\vec r)}{w_r+t(w_R-w_r)}&=\frac{(1-t)\vec r+t\vec R}{(1-t)w_r+tw_R}\\ &=\frac{(1-t)w_r}{(1-t)w_r+tw_R}\frac{\vec r}{w_r}+\frac{tw_R}{(1-t)w_r+tw_R}\frac{\vec R}{w_R}\\ &=\left[1-\frac{tw_R}{(1-t)w_r+tw_R}\right]\frac{\vec r}{w_r}+\frac{tw_R}{(1-t)w_r+tw_R}\frac{\vec R}{w_R}\\ &=\frac{\vec r}{w_r}+\frac{tw_R}{(1-t)w_r+tw_R}\left(\frac{\vec R}{w_R}-\frac{\vec r}{w_r}\right)\\ &\equiv\frac{\vec r}{w_r}+t'\left(\frac{\vec R}{w_R}-\frac{\vec r}{w_r}\right) \end{aligned} $$如果我们表示成 $\vec {g_\text{h}}(t)$、$\vec {r_\text{h}}$、$\vec {R_\text{h}}$,那么总结一下,有:
$$ \vec f(t)=\vec q+t(\vec Q-\vec q) $$经过透视变换后:
$$ \vec g(t)=\vec r+t(\vec R-\vec r) $$然后经过同质化后:
$$ \vec {g_\text{h}}(t)=\vec {r_\text{h}}+t'(\vec {R_\text{h}}-\vec {r_\text{h}}) $$其中:
$$ t'=\frac{tw_R}{(1-t)w_r+tw_R} $$我们发现确实是这样,而且,$t'=f(t)$ 是个连续函数,确保不会被“撕裂(torn)”
视野(Field-of-View)
虽然我们可以使用 $l$、$r$、$b$、$t$ 来指定窗口,但是有一个更简单的方法:从窗口的中心观察,即 $l=-r$,$b=-t$
这样的话只需要两个自由度就能表示这个窗口
如果我们添加了这样一个约束:
$$ \frac{n_x}{n_y}=\frac{r}{t} $$来表示“图像的性质没有失真”,即二者比例相同。
一旦二者比值被指定,那么还需要一个自由度就可以表示这个窗口了,通常使用视野来指定:
$$ \tan\frac{\theta}{2}=\frac{t}{|n|} $$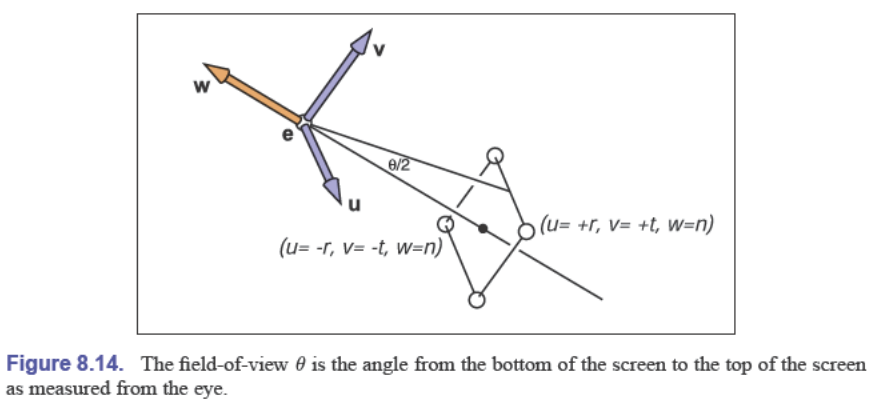
在某些系统中,$n$ 被硬编码成一个合理的定值,那么我们只需要知道 $\theta$ 就可以计算出 $t$ 了
问题和练习
在透视矩阵中:
$$ z'=n+f-\frac{nf}{z} $$当有一个线段,它跨越了 $z=0$ 时会发生撕裂,即 $a/0=\infty$,$a/-0=-\infty$,这通常可以使用剪切来避免,但是撕裂现象使剪切本身变得更加复杂,之后会讨论
在透视变换之后,需要把 $w$ 坐标变成 $1$
构建视口矩阵,其中像素坐标从图像顶部向下计数:
$$ \begin{aligned} x'=n_x\frac{1+x}{2}-0.5=\frac{n_xx+n_x-1}{2}\\ y'=n_y\frac{1-y}{2}-0.5=\frac{-n_yy+n_y-1}{2} \end{aligned} $$那么矩阵为:
$$ \mathbf M_{\text{vp}}=\begin{bmatrix}\frac{n_x}{2} & 0& 0 & \frac{n_x-1}{2}\\0 & -\frac{n_y}{2}& 0 & \frac{n_y-1}{2}\\0 & 0& 1 & 0\\0 & 0& 0 & 1\end{bmatrix} $$视口矩阵与正交矩阵相乘的意义是:一个长方体映射到正方体,再将 $x$ 与 $y$ 坐标映射到屏幕空间。两个操作合在一起就是将 $[l,r]\times[b,t]\times[n,f]$ 映射到 $[-0.5,n_x-0.5]\times[-0.5,n_y-0.5]\times[-1,1]$
略
从代数角度证明透视矩阵保留了视场内的 $z$ 值顺序。略
略
略
略
略
略
使用前面的办法构建正交基即可?
根据 $f(t)$ 很容易证